RoboCount™ 2020 ロボット非破壊型廃棄物分析システム
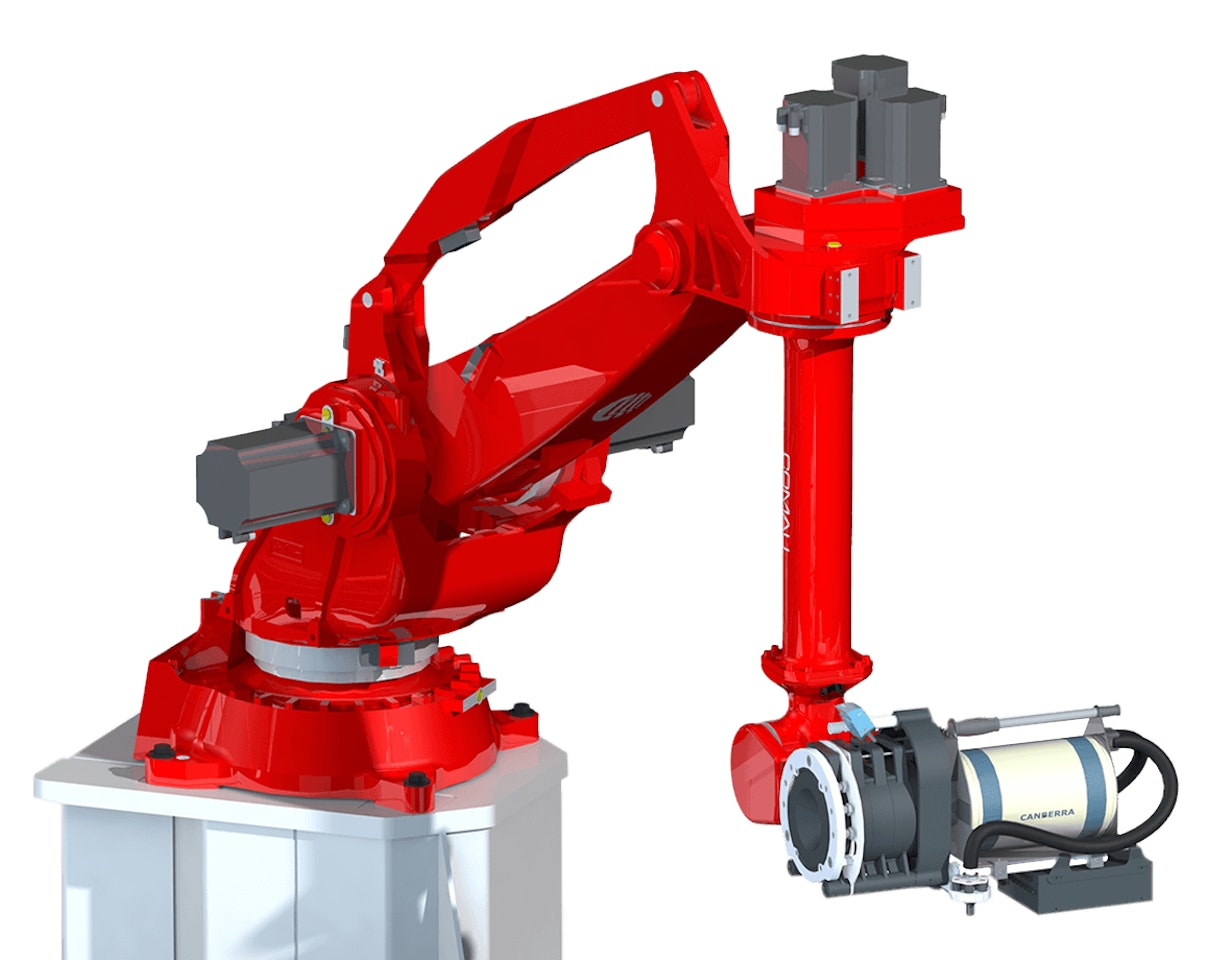
RoboCount 2020を設計する際の重要なアイデアは、実績のある産業用ロボットプラットフォームを使用し、それを利用可能な最高の高分解能ガンマスペクトロメトリーハードウェアとソフトウェアと組み合わせ、専用のマルチプラットフォームユーザーアプリケーションによるシームレスな制御を提供することでした。
RoboCount 2020を設計する際の重要なアイデアは、実績のある産業用ロボットプラットフォームを使用し、それを利用可能な最高の高分解能ガンマスペクトロメトリーハードウェアとソフトウェアと組み合わせ、専用のマルチプラットフォームユーザーアプリケーションによるシームレスな制御を提供することでした。